优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
MINAS A6(A6SE系列、A6SG系列、A6SF系列)的特点与性能・功能、
Realtime Express(RTEX) 超高速网络伺服型电机 MINAS A6N系列的特点说明。
|
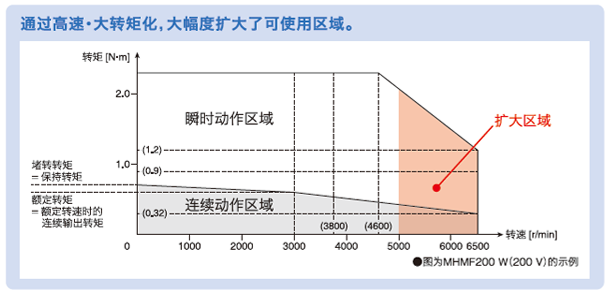
实现行业最高等级的高速・大转矩与小型轻量化※1
|
|
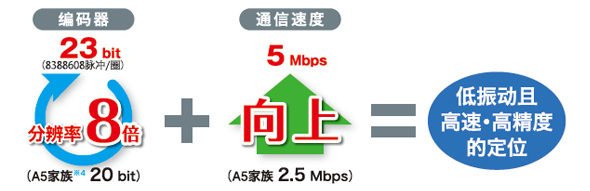
通过提高位置检出分辨率,实现更加平滑的高精度定位
|

|
实现了极速正确动作的, 高速响应・高精度定位。
|
通过CPU等硬件的更新以及搭载了当社独自开发的新型算法,实现了更高速的响应性。同时,可自动去除根据共振产生的微振动、根据机械的摇动产生的振动等,实现了高精度的定位。 |

|

|
通过简单的快速设定、整定时间与以前相比减少约64%※1。
|
通过新升级了的适合增益,大幅度缩短了调整时间。可自动设定・调整自适应陷波滤波器功能及各种增益。 |

|

|
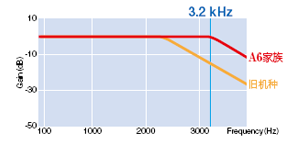
提高生产性,实现响应频率3.2 kHz。
|
实现响应频率3.2 kHz。 |
|
将防尘性与耐热性更好的带油封(带保护唇)电机加入阵容中
|
在原有相同规格的带油封电机阵容中,追加了防尘性与防油性更好的带油封(带保护唇)电机。此机种由于变更了油封的材质,提高了耐热性。 |

|
|
■油封对照表
|
||||||||||||||||||||||||
对应IP67的电机(□80 mm以下为订购品)
|
采用与电机的电源・编码器输入输出部直接连接的连接器, |

|
IP是什么?
|
表示防尘・防水性能等级的国际标准规格。
|
||||||||||||||||||||||||||||||||||||
动态制动器功能
|
通过设定参数,在伺服使能OFF时,正方向/负方向驱动禁止时,电源断电时,异常停止时,可选择使伺服电机的U、V、W的卷线短路的动态制动器动作。 请根据机械设备的要求规格,选择设定动作时序。 |
电源突入电流抑制功能
|
接通电源时,为防止由于突入电流引起的电源配线用开关误动作,内置了突入电流抑制电阻。 |
参数初始化功能
|
通过前面板或PC使参数恢复到出厂设置。 |
半闭环/全闭环(输入脉冲8 Mpps、输出脉冲 4 Mpps)对应
|
A6SF系列可对应全闭环控制,实现指令输入8 Mpps,反馈输出4 Mpps的高分辨率、高速运转。可对应业界顶级范畴的高性能定位分辨率指令(脉冲列指令的情况下)。 |

|
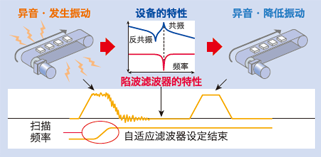
自动/手动 陷波滤波器
|
搭载简单的自动设定陷波滤波器的功能。不需进行繁琐的振动频率测定便可自动检测振动,并设定陷波滤波器。 |
|
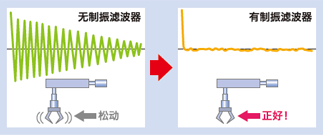
自动/手动 制振滤波器
|
搭载了通过安装支援软件自动设定制振滤波器的功能。制振滤波器根据指令输入去除固有的振动频率,可大幅降低停止时轴的摆动。 |
|
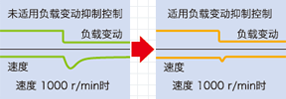
负载变动抑制控制
|
根据工件的载重变化等相应的惯量也会变动,本功能可自动设定最适合的增益表。通过此方法,机械设备的动作可达到稳定状态。 |
|
再生处理功能
|
使较大惯量的负载停止时或上下轴驱动时,通过再生电阻消耗由伺服电机返回给伺服驱动器能量的功能。 |
摩擦转矩补偿功能
|
为降低机械类摩擦的影响而提高响应性的功能。通常补偿一定动作的零漂转矩为偏载重补偿,可根据动作的方向设定动摩擦补偿,根据指令速度变化设定粘性摩擦补偿。 |
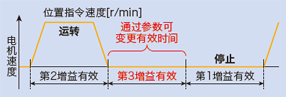
增益3段功能
|
除通常的增益切换外,追加了第3段增益切换功能。可在停止・运转时的增益中设定停止间隙时的增益。暂时提高停止间隙时的增益,可缩短定位时间并且降低振动。 |
|
惯量比切换功能
|
可通过接口的切换输入功能,可进行第1段/第2段惯量比的切换。通过该功能,可提高有/无负载等情况下,惯量增大到第2段时的响应性。 |
输入输出信号分配功能
|
可通过参数任意分配通用的10个输入,6个输出信号。(输入信号都可进行常开,常闭的选择)。通过使用安装调试软件「PANATERM」,设定更加轻 产品参数
×
产品询价表单PRODUCT INQUIRY FORM
全国服务电话:400-827-2720(周一至周五 8:30-18:00)
周末及节假日请联系18015501787  订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
友情链接:-- 请选择 --
全国服务电话:400-827-2720(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络 |