优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器

|
虚拟圆 |
|
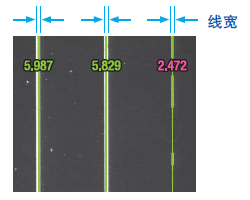
线宽 |

|
文字图形绘制 |
采用先进的超高速管线处理技术,即使在量产正式运行中,也无需停止生产线即可编辑程序、执行测试。
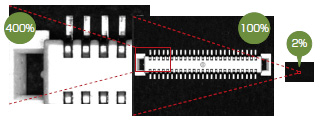
卓越出众的超高速处理在PV500V2的生产现场实现了使用便捷性和高生产率功能。
采用五处理器、DSP处理、管线处理这三大技术,实现了三重缓冲。
|
配备了试运行功能,可降低风险。
在RUN过程中改写,不降低生产性。
可随时对检查设定进行微调。 |

|
Triple Buffer
配备3个图像处理储存器,其中2个用于实现高速化的管线处理、
1个用于在RUN中改写程序和执行测试。无需停止生产即可变更、调整程序。
|
松下电器在全球率先开发的三重缓冲。
在生产线运行中实现区域变更、参数变更、测试执行、程序改写等完全在线调整。
无需停止生产线即可实现只能在现场进行的程序最终微调。另外,还配备画面自定义等支持功能,在限制颇多的现场为作业人员提供支持。
|
|
显示单位换算轴
标记功能 |

|
数据R(Read)/W(Write)
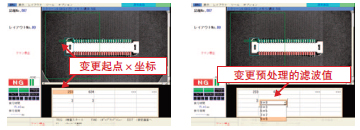
确定程序后,有时需要在现场对检查区域和预处理参数等进行调整。类似这样的细微的修正变更,无需替换程序或进入设定画面,在RUN中短时间内即可完成。(80项目/页、最多4页)只要使用设定软件PVWIN,即可显示任意文本(8种语言、9种字体)。
|
备有图像预处理滤波器、检测设备功能等丰富的解决方案工具,有利于课题的解决。
另外,还提升了使用便捷性和操作性。
实现了客户所要求的高度可靠性的稳定检查,同时减少编程工时,提高生产率。
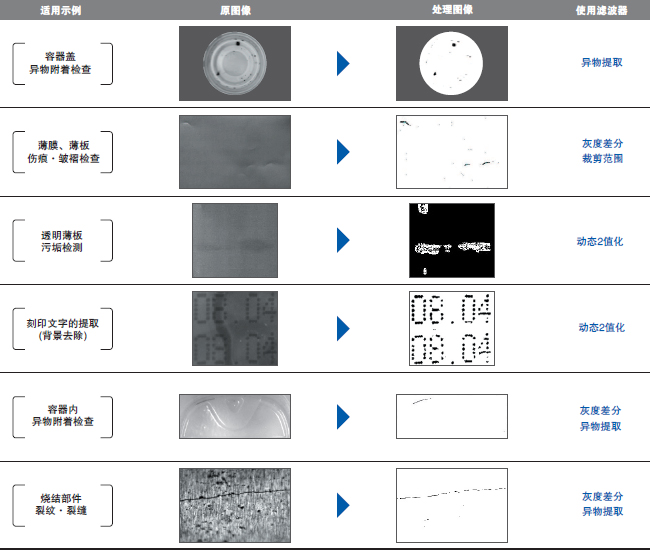
备有21种丰富的图像预处理滤波器。
即使是照明不均匀或产生干扰的图像,也可实现更稳定的检查。
●预处理滤波器:共21种 ●预处理组:最多5组/相机 ●预处理等级:最多10级/组
|
|
|
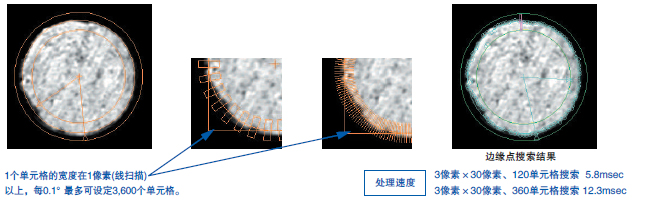
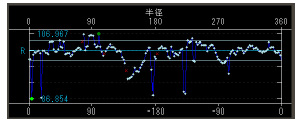
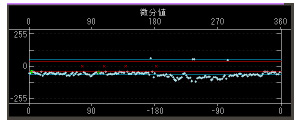
该功能通过对象物体的边缘点求出圆心、半径、直径、偏差等。
|
工作原理
1.设定放射状区域,搜索区域内包含的边缘点,检测圆或圆弧的轮廓。
2.按照假设圆检测条件,根据有效的边缘点来高精度地确定圆,算出圆心、半径和直径。
3.进一步根据判定条件限定测量对象的边缘点,进行OK/NG判定。
根据图表显示指定条件
|
|
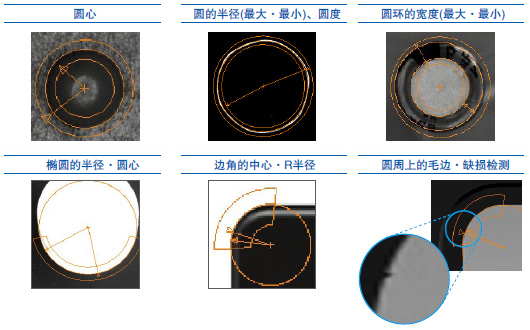
应用事例
|
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络