

优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
hyhyhyh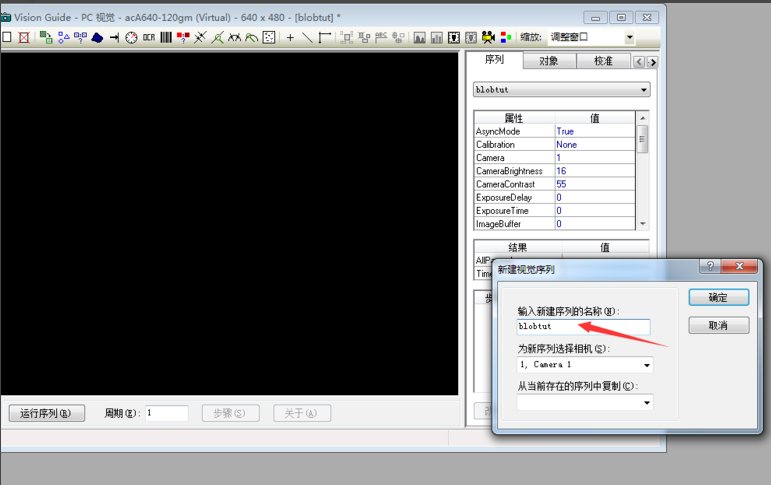
本教程的目标视场应为40mm×30mm左右。我们发现,就该视场而言,16mm镜头和1mm伸缩管在167mm至240mm的距离范围能很好地开展工作。这表示您在实践本教程时,也可使用16mm镜头和1mm伸缩
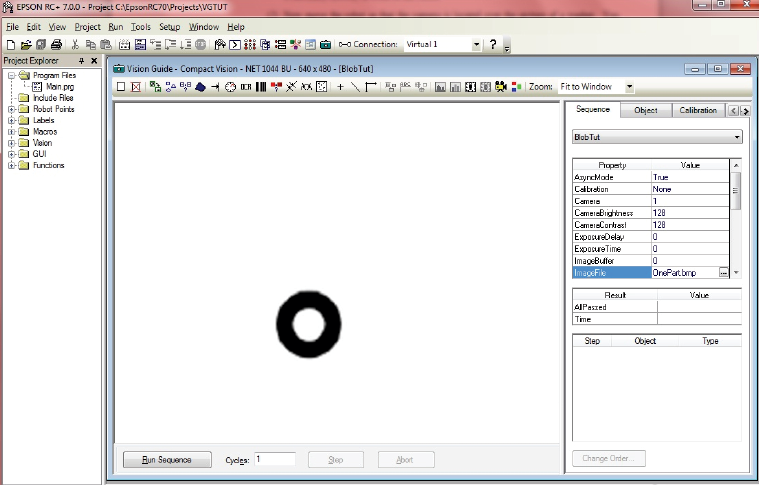
(1)选择中心印有单独垫圈图样的靶纸并将它放在工作表面的适当位置,以便机器人能够很轻易地将相机放在上面。最好的位置通常为机器人的正前方。创建一个新的Blob对象(二进制对象)。用鼠标左键点击视觉引导7.0工具栏上New Blob(新二进制对象)工具栏按钮,然后单击鼠标左键。此举将完成新Blob对象(二进制对象)在图像显示区域中的定位。(可以手动拖动调整Blod对象的大小)
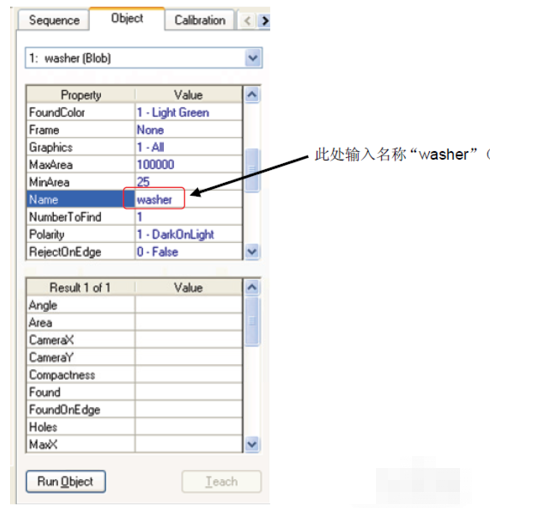
找到Name(名称)属性。双击Name(名称)属性的Value(值)并修改
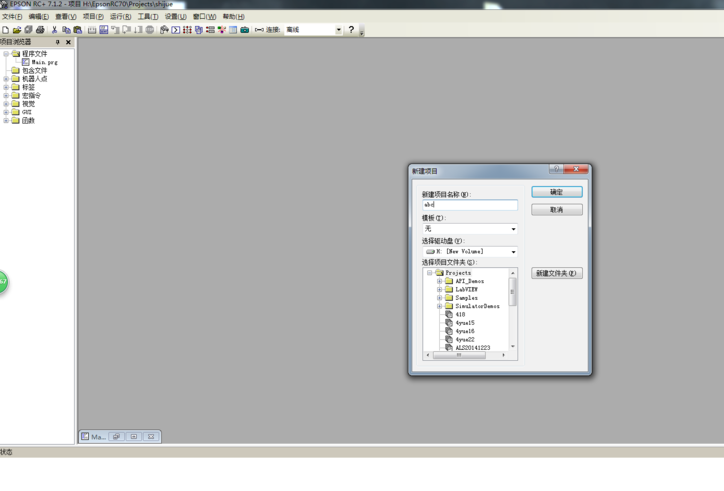
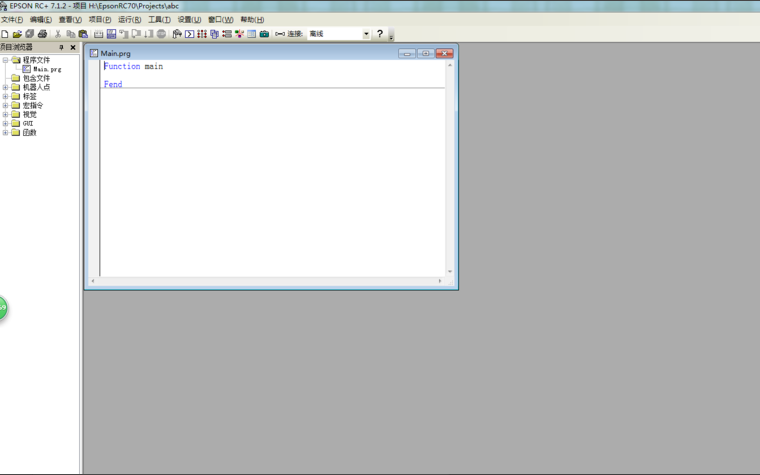
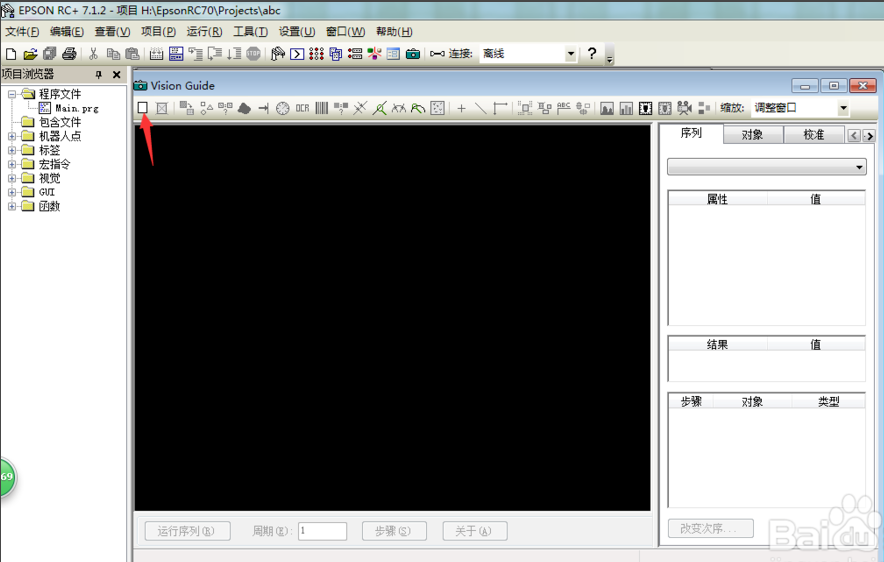
爱普生机器人添加视觉向导
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络

