

优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
随着科技的进步以及现代化进程的加快,人们对搬运速度的要求越来越高,传统的人工码垛只能应用在物料轻便、尺寸和形状变化大、吞吐量小的场合,这已经远远不能满足工业的需求,优傲机器人码垛机应运而生。

优傲机器人码垛机是工作人员的手足与大脑功能延伸和扩展,它可以代替人们在危险、有毒、低温、高热等恶劣环境中工作;帮助人们完成繁重、单调、重复的劳动,提高劳动生产率,保证产品质量。
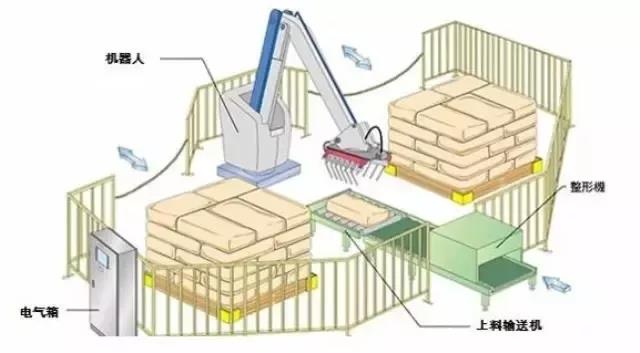
三、码垛工业机器人生产线关键部件
1、码垛工业机器人机械抓手
作为码垛机器人的重要组成部分之一,码垛机械手(也称手爪或抓手)的工作性能,包括高可靠性、结构简单新颖、质量小等参数对码垛机器人的整体工作性能具有非常重要的意义。
可根据不同的产品,设计不同类型的机械手爪,使得码垛机器人具有效率高、质量好、适用范围广、成本低等优势,并能很好地完成码垛工作。
2、常用的码垛机器人手抓主要包括:
夹抓式机械手爪
主要用于高速码袋

该类机械手手爪主要用于袋装物的码放,如面粉,饲料,水泥,化肥等等。
夹板式机械手爪:主要适用于箱盒码垛
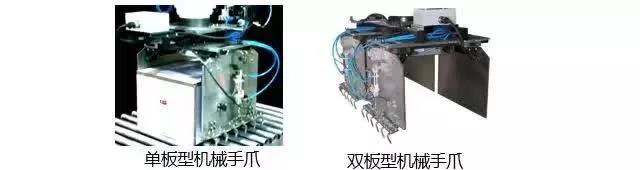
该类手爪主要用于整箱或规则盒装包装物品的码放,可用于各种行业。可以一次码一箱(盒)或多箱(盒)。
真空吸取式机械手爪:主要适用于可吸取的码放物
该类手爪主要用于适合吸盘吸取的码放物,如覆膜包装盒,听装啤酒箱,塑料箱,纸箱等。
夹抓式机械手爪:适用于几个工位的协作抓放

组合式手爪是前三种手爪的灵活组合,同时满足多个工位码放。
用于检测食品、医药、化装品、纺织等生产过程中混入的金属异物。
通过重量检测,亦可判断出成品的数量、漏装和错装,以及对合格品、欠重品、超重品进行分别统计,以达到产品质量控制的目的。
用于完成包装袋在出现含金属异常物以及包装袋在称重复检超出重量误差时,包装袋在输送序列被移出去的过程。自动剔除机也可集成到金属检测机或者重量复检机内。
是将输送机送来的料袋按预定的编组程序对料袋进行输送、倒袋和转位,流转到下道工序。
包装袋经过输送线后,须经过辊子的压紧、整形,将包装袋内可能存在的积聚物均匀散开后才可以送至待码辊道输送机上。
与机械手爪配套,方便抓取
便于物料输送过程中的转弯,以及与下一工序的对接。
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络

