

优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
EPSON工业机器人是工业机器人市场重要的一员,为中国自动化行业的发展做出了重要贡献。那么设备设计人员该如何进行EPSON机器人的选型呢?以下将做详细说明。
一般来说,EPSON机器人选型将从以下几个方面考虑:
1.根据产品、工艺、使用环境确定机器人的类型;是标准型还是洁净型
2.根据产品的重量(产品或抓手或产品+抓手)、惯量确定机器人的负重水平;
3.根据工作半径来选择机器人的臂长;
4.根据工艺要求确定核对机器人的最大速度、精度、IP、ISO、防爆等;
5.根据实际需要选择外围设备(如视觉系统、扩展通信口、示教单元、力觉传感器等)。
接下来展开说明:
1. 根据产品、工艺确定机器人的类型:
EPSON机器人主要分四轴机器人,也叫桌面机器人,或叫SCARA(Selective Compliance Assembly Robot Arm)和六轴机器人。选型时需要根据产品的工艺确定是需要四轴机器人还是六轴机器人。一般来说,如果作业要求只是平面和上下动作需求,则优选四轴机器人,如果作业要求是空间性质的,即不止简单的平面和上下动作,还包含任意方向倾斜方向的动作,那么只能选六轴机器人。以下为示意图。

关于EPSON机器人型号的说明:

需要补充说明的是:
①T系列、LS系列只能桌面安装,G系列支持桌面安装、吊顶安装、侧壁安装(型号不同),RS系列为吊顶安装,C系列支持桌面安装、吊顶安装、侧壁安装及任意角度安装(硬件型号相同,只需要根据安装方式修改软件型号配置)
②四轴机器人中,G系列属于高端机,全进口机器人,价格更高、速度更快;
LS系列/T系列属于高性价比机型,也是中国市场的主力机型。
至此,我们能初步确定选定四轴还是六轴。
2.根据产品的重量(产品或抓手或产品+抓手)、惯量确定机器人的负重水平:
EPSON机器人末端负载:SCARA:1kg-20kg;
六轴:4kg-12kg。
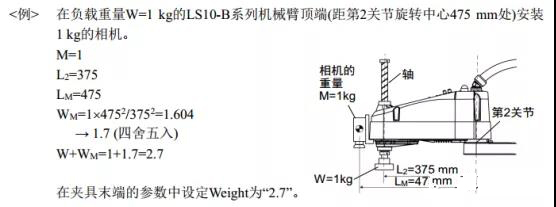
为了充分发挥机器人自身具备的性能,请先计算负载(夹具末端重量+工件重量)重量,确保选型时,设计负载不要超过机器人有效负载。
关于机器人末端负载的计算,参考以下计算方式计算:

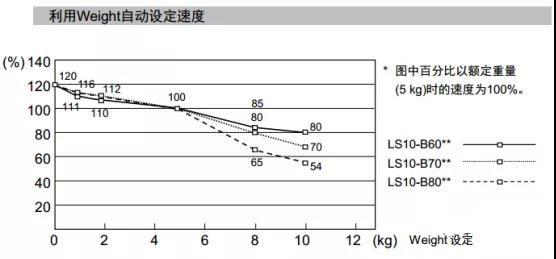
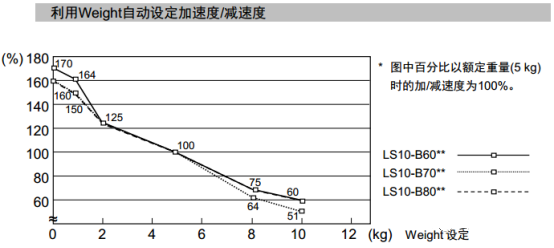
在满足工况需求的情况下,希望末端重量越小越好。因为设定weight后,会自动设定机器人运动的速度和加减速。重量越小,加减速越快,能达到的最高速度越搞,同样路径的CT更短。Weight对速度和加减速的影响曲线如下所示(以LS10为例):
至此,我们对负载的选择有了初步的认识,那么在机械设计阶段,负载尽量轻量化设计成为一种必然。
3.根据工作半径来选择机器人的臂长。
第二步确定负载后,接下来就需要确定臂长(即机器人工作范围的最大半径,具体完整的工作范围需要参照对应型号机器人的运动范围图)。
EPSON机器人臂长,从175mm-1000mm均有覆盖,当然,不同负载机器人臂长范围有所不同,选定负载后,进一步缩小臂长的选择。比如选定①桌面SCARA②最大负载6kg,那么臂长的选择就有如下几种:T6-602S——600mm;
LS6系列——500mm、600mm、700mm;
G6系列——450mm、550mm、650mm.
需要机械工程师根据设备机器人的工作范围来选定具体哪一款。但注意以下细节部分:
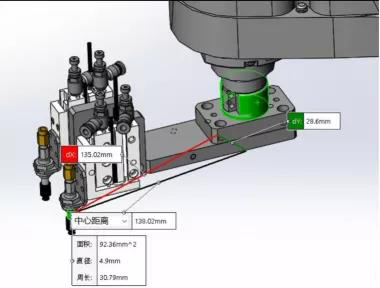
① 比如需要的工作范围最大540mm,根据上面介绍最合适的是G6 550mm系列,但考虑到G6价格比较贵、货期比较长,因此也可以考虑LS6-602S(600mm臂展),但600mm臂展需要机台整体设计的更大,运动过程中还可能有干涉,第二选择就是LS6-502S(500mm臂展),此时需要增加末端40mm延长杆(如下图示,尺寸以实际尺寸为准)。当然,因为夹爪偏心会使CT更长(具体原因后面讲),到底能否选择LS6-502S,还需要机器人软件模拟CT进行测试。
② 关于延长杆设计,需求如上文所述,接下来说明延长杆设计对CT的影响。
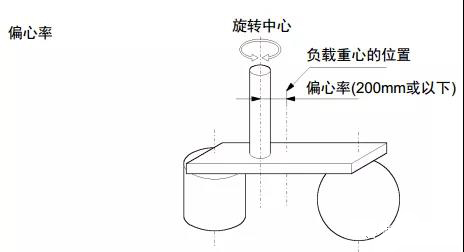
延长杆设计反映在机器人参数,为离心率(参照如下图示)。
请务必将负载(夹具末端重量+工件重量)的离心率控制在200 mm以下。 LS10-B系列机,其他型号需要查询对应机器人手册。器人的设计不对应超过200 mm的离心率。另外,请务必根据离心率情况设定离心率参数。如果在离心率参数中设定小于实际离心率的值,则可能会导致发生错误或冲击,这不仅不能充分发挥性能,而且还可能缩短各机构部件的使用寿命或因皮带齿轮跳动发生位置间隙的可能性。
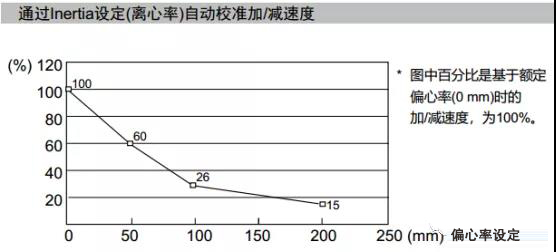
离心率不会影响最大速度,但会影响加减速。具体曲线如下所示(以LS10为例,其它机型请查阅对应机器人手册):
③关于惯性力矩的说明:
影响机器人CT的还有一个因素即惯性力矩
惯性力矩计算方法:

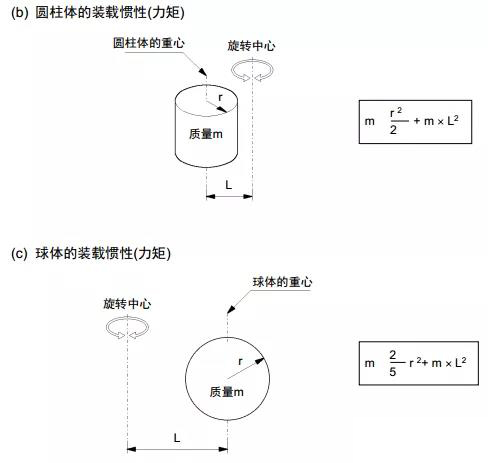
当然,更复杂的机构,需要机械工程师利用设计软件协助计算。
惯性力矩对CT的影响:

④关于第三关节自动加减速的说明:
当第3关节(Z)处于高位情况下,在水平PTP动作期间移动机器人时,动作时间将更快。当第3关节低于某点时,便会利用自动加/减速度来减小加/减速度。(请参阅下图)轴的位置越高,动作加/减速度越大。但在上下移动第3关节时就需要更长时间。请在考虑当前位置与目标位置之间的关系后再调整机器人第3关节的位置。利用Jump命令在水平动作期间实现的第3关节上限可通过LimZ命令进行设定。
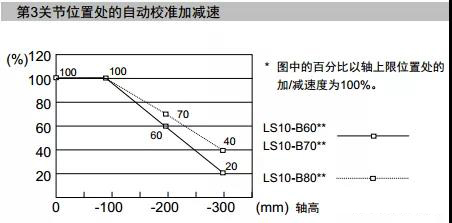
从上面可以看出,高度方向,设计在-100mm范围内使用是最优的(以LS10为例,其它机型请查阅对应手册)。
4.根据工艺要求确定核对机器人的最大速度、精度、IP、ISO、防爆等。
①速度(此项工作需要一定工作经验的技术工程师执行)
经过上面3步初步选定了机器人型号,比如选定了LS6-502S(6kg负载,500mm臂长,离心率最大150mm),接下来需要在EPSON机器人软件(后续简称RC+软件)进行仿真(包括是否干涉、CT是否满足),如果有干涉,需要把机械图纸(只保留机器人相关部分)导入RC+软件检查确认干涉的处理。如果没有干涉,那就更简单,提供机器人工作位置信息即可,如下为示例:

最后一行即为循环CT,与技术规格书要求的CT进行对比,如果满足,则OK,如果不满足,则需要重新选择更快的机器人、改变布局或者减少末端重量、减小惯性力矩、缩短工作距离、减小离心率等措施;
②精度、IP、ISO等查阅选型手册即可;
③关于防爆,EPSON机器人目前没有防爆机型。
5.根据实际需要选择外围设备(如视觉系统、扩展通信口、示教单元、力觉传感器等)
机器人本体选定后,控制器基本也确定。接下来需要确定以下外围设备:
① 通讯方面,EPSON控制器自带24输入/16输出,TCPIP、RS232、Modbus-TCP从站,这些是否够用?如果不够,考虑增加IO板卡或与上位机对应的总线板卡(选件,另外购买);
② 客户现场是否需要示教器,目前有TP2/TP3可选,TP2进行简单的示教操作,TP3可实现编程操作;
③系统是否有视觉需求,如有,EPSON有对应的视觉产品:独立控制器CV2系列或计算机视觉PV1,此时需要联络EPSON服务商做进一步沟通;
④ 系统是否有压力传感器需求。爱普生压力传感器作为一种触觉产品,目前具备力觉坐标系、力觉控制、力觉触发、力觉监控等功能,也请联络EPSON服务商做进一步沟通。
⑤ 其他需求,请联络EPSON厂家或服务商咨询。
总结:通过以上内容,我们了解到工艺、负载、夹具离心率、惯性力矩、路径规划、视觉、力觉等对于机器人性能的发挥起着至关重要的作用,在设备设计初期,我们通过对项目整体的把控,选择一款合适的机器人,对于项目的成功起到事半功倍的作用。
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络

