高速运转处理 [速度是以往机型的8倍!]
基本命令:10ns~ (10k步以内)
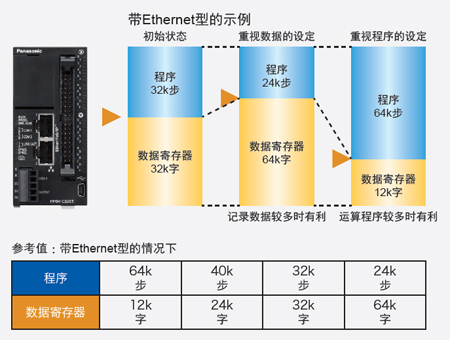
高容量最大 64k步 [从以往机型的2倍!]
程序容量:64k/40k/32k/24k 步可调
数据容量:12k/24k/32k/64k 可调
|
|
|
I/O:
|
输入16点、输出点16 晶体管输出(NPN / PNP)
|
|
内置I/F:
|
Ethernet×2端口、RS232C×1ch、USB×1ch
|
|
扩展I/F:
|
FP0H / FPΣ扩展总线×1、FP0R扩展总线×1 插卡槽×1(RS232C、RS232C×2、RS485、RS232C+RS485)
|
|
工具软件:
|
FPWIN GR7
|
最大I/O点数384点、可使用FP0H / FPΣ / FP0R的单元进行扩展
选择所需要的功能,对各种设置进行控制!
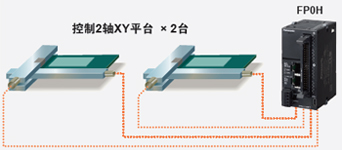
内置4轴脉冲输出
内置4轴脉冲输出,因此可实现2组2轴直线查补动作的同时控制。例如,还可对两台xy平台进行控制
|
|
|
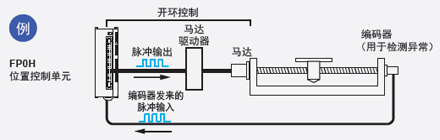
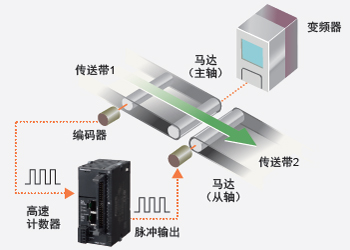
高速计数器输入+脉冲输出
与梯形图程序相组合,利用高速计数器输入来检测编码器发出的脉 冲信号,因此可用于以下案例:通过调整脉冲输出的频率,从而使 主轴从轴的速度实现同步
|
如上图所示,利用编码器脉冲的计数来检测变频器所控制的传送带 1的速度,将与该速度相符的脉冲输出(JOG运行)至马达(从 轴),使传送带2的速度实现同步。
|
|
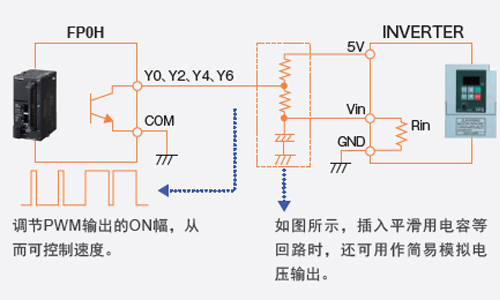
内置多点PWM输出(4ch)
FP0H中还可将脉冲输出端口用作PWM输出端口
应用案例:还可用作模拟电压输出,对变频器的速度进行控制等。
■ 对应EtherNet/IP、Modbus-TCP、MC协议※
■ 简单连接各种机械手、PLC※
■ 利用插卡方式,削减单元成本和安装空间※
※:对应EtherNet/IP
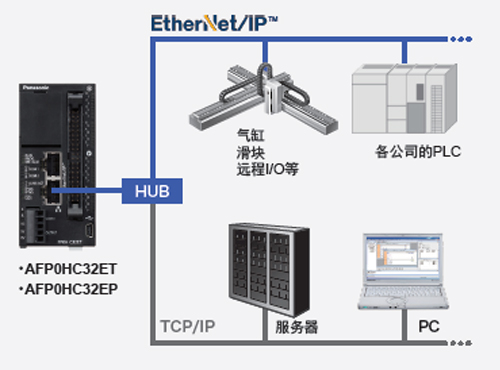
对应EtherNet/IP
带Ethernet型控制单元对应EtherNet/IP 。
可简单连接各种机械手、PLC,进行控制和通信。
(注):EtherNet/IP是ODVA的商标。
|
|
|
利用插卡方式,削减单元成本和安装空间。
能以较低的成本在控制单元上简单扩展串行通信功能。
|

|
|
■ 内置SD存储卡插槽。配备记录・追踪功能※
■ 利用项目复制功能,无需使用PC,即可对梯形程序数据进行复制※
(使用可编程智能操作面板时)
■ 将数据容量设定为可调式,从而弥补容量不足。
■ 程序容量最多64k步※
※:仅限带 Ethernet 型。
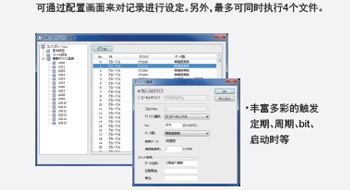
简单·同时执行多个记录
可通过配置画面来对记录进行设定。另外,
最多可同时执行4个文件。
|
|
|
分享数据容量,弥补容量不足。
无需再重新购买高昂的更高等级型号。
|
|
|
可使用SD存储卡来更新程序
可将程序保存到SD存储卡内,并进行读取。
可经由SD存储卡简单更新程序。
※:仅限带 Ethernet 型。
|

|
|
控制单元中内置4轴脉冲输出(各轴最大100kHz) [控制单元]
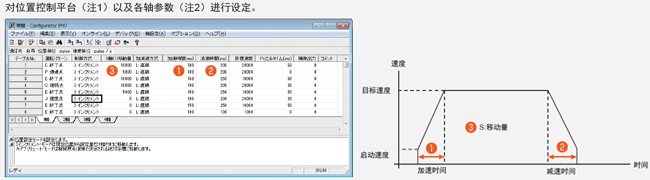
利用专用设定工具设定位置控制的动作模式,只需启动,即可简单地实现位置控制。
位置控制的设定
对位置控制平台(注1)以及各轴参数(注2)进行设定。
|
|
|
(注1):
|
:位置控制平台是指移动量、目标速度、加·减速时间、运行模式等各个位置控制动作的信息。
|
|
(注2):
|
各轴参数是指JOG运行以及原点复位的运行条件,限位输入逻辑、停止时的减速时间等。
|
|
|
还可利用位置控制单元(高速启动5μs)来对应超高速的线性伺服 [扩展单元]
脉冲输出最大4Mpps,5μs高速启动,还可对线性伺服进行控制
最适用于以下应用案例:电子部品的堆垛等,高速重复执行短行程动作。
配备有高速计数器,因此可检测到异常情况
位置控制运行时,对编码器等的反馈脉冲进行计数,从而可对驱动方面的异常情 况等意外事故进行检测
|
位置控制运行时,对编码器等的反馈脉冲进行计数,从而可对驱动方面的异常情 况等意外事故进行检测。
|
|
利用JOG位置控制功能,对应恒定进给
利用高速启动,重复控制,还可用于恒定进给加工用途
对应位置控制单元RTEX,可控制松下RTEX网络伺服
对应网络伺服 MINAS A4N / A5ⅡN / A6N,大幅削减配线工时。
网络电缆采用市售的LAN电缆。卓越的便利性・经济性・弯曲性。
通信速率高达100Mbps。实现高精度的多轴位置控制。
备有2轴、4轴、8轴三种类型。 可灵活对应各种轴数的控制。
通过设定软件 Configurator PM 为设定~启动~监控提供强力支持。
|
启动位置控制专用设定工具软件 Configrator PM ,简单设定参数, 即可完成位置控制的动作设定。 还支持试运行,即使控制单元处于程序模式,也可对位置控制动作进行确认。
|
|
|
秉承FPΣ的超小型尺寸
可将FPΣ所使用的梯形图程序转换为FP0H用
利用Control FPWIN GR/GR7编写的FPΣ用梯形图程序可转换为FP0H用。
将FPΣ替换为FP0H时,无需重新编写梯形图程序。
(注):使用不支持的对象指令(F176 SPCH:圆弧插补)时,请先替换相关指令,然后再转换机型。





 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯