优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
将中规模PLC(RS232C)的功能压缩到小型的PLC内。
具有优良的性能价格比、最适于与其他机器组合使用的一款。
|
以标准型的CPU单元为首,配备了经常使用的高性能的4种类型带高性能的 CPU单元。可根据不同用途构筑更为经济的系统。
|
进深:108.3mm |
安装面积为W140×H100mm(5模块时), 与袖珍本的大小完全匹配的小型型号, 机器组装时, 可把所需的空间控制到最小限度。 |
尺寸虽然小巧,但因机型而异,可选择32k、60k、120k步型的程序内存。还备有丰富的运算用内存。 另外,最大控制I/O点数为2,048点(使用远程I/O时:8,192点),可充分对应中等规模的控制。
■ 存储器选件的扩展
在CPU单元内,可使用IC卡来保存程序及扩展数据内存。
■ 根据不同母板进行I/O扩展
|
标准母板 |
|
|
母板H型的情况下 |
|
| 标准品 | H型 | |
|---|---|---|
| 最大扩展块数 | 1+1=2块 | 基本1+扩展3=4块 |
| 最大单元数 | 12+13=25单元 | 8+8×3=32单元 |
| 最大I/O点数 | 25×64=1,600点 | 32×64=2,048点 |
| 最大电缆长度 | 1根 2m | 3根 3.2m |
| ※ | H型产品与标准品不能混合使用。 |
|---|
■ 复合通信单元(MCU)
|
采用装卸式串行通信插件。 |

|
|
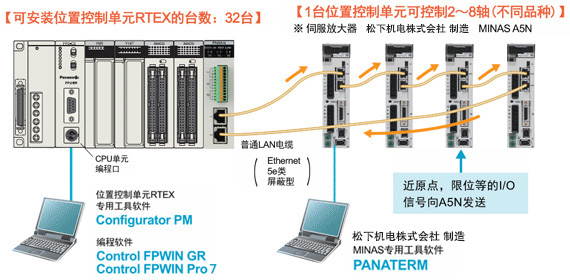
■ 位置控制单元RTEX
对应Realtime Express MINAS网络伺服A4N/A5N/A6N※1
可简单实现多轴高精度定位。(A5N对应Ver.1.3以后,A6N对应Ver.1.4以后)
|
|
采用普通的LAN电缆。从经济性及易获取性来看, 具有绝对优势
Realtime Express※1作为其他的网线材料, 采用了普通的LNA电缆。因此从布线工序来看,在经济性、易获取性及操作性来看, 具有绝对优势。
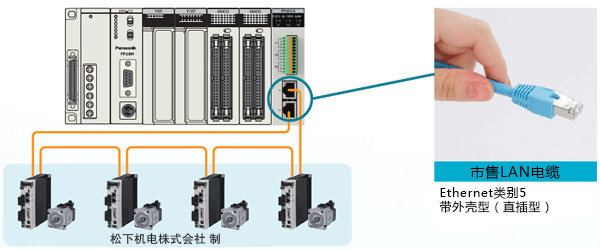
※1 Realtime Express及MINAS A4N/A5N为松下电器产业株式会社的注册商标及商品名称。MINAS A4N与A5N不能混合使用。 |
新功能追加
1.反复定位功能
于绕线机、研磨机等反复进行同一操作的装置非常有效。
2.追加了原点返回方式
追加了能够实现装置精简化的限位停止方式以及手动停止方式等8种功能。
3.同步运行
可以指定1根主轴、1根从轴。通过2根轴进行作业台上的移动搬运等。
4.实时扭矩限制
在运行中的任意时点都能改变扭矩限制值。进行轴的压入制动等。
5.JOG定位控制
通过传感器输入,在指定位置减速停止。可运用于贴标机等。
6.辅助触点(延迟模式)
在定位运行中的任意时点都能输出辅助触点。
7.現在値変更機能
可将当前值变更为任意值。可用于原点偏移值。
8.系统启动时的运行变更
伺服放大器侧电源即便不启动,也可实现单元启动。
|
|
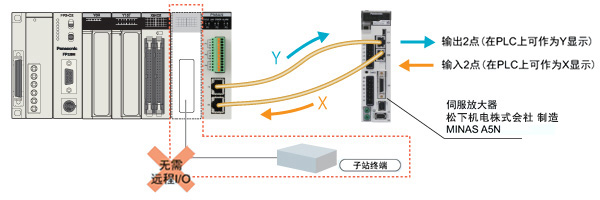
伺服放大器内置有通用输入/输出4点,因此无需远程I/O终端。
伺服放大器内置DC输入2点/DC输出2点,通过网络分别作为X、Y反映在PLC上。
通过控制轴局部进行的各种传感器信号输入以及灯管闪亮用输出等,可在PLC上进行控制,削减了因此而需要添加远程I/O系统的成本。
|
■ 位置控制单元(多功能型)
高速·高精度的脉冲输入型位置控制单元。 速度指令: 最大4Mpulse/s 启动时间: 0.005ms。
|
可适用于脉冲型步进电机、伺服电机等产品。 |
|
|
|
■ 位置控制单元(插补型)
|
对应同步运行、插补控制, 简单实现搬运工作台的平行移动· 切削加工· X、 Y工作台的控制· 码垛机· 绕线机等应用程序。
|
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络