一站式解决方案 One-stop Solution
RTEX(Realtime Express)是为了实现伺服电机控制更高的同步性、实时性,松下独自开发的网络总线系统。
|
系统理念
|

|
|
|
性能优化
|

|
●通过对应MINAS-A6N特殊机能、实现更高速高精度的控制。
●标准配备脉冲输出功能,强化系统的对应力。
|
|
|
可应对各种应用
|
|
|
|
Panasonic 网络动作
|

|
|
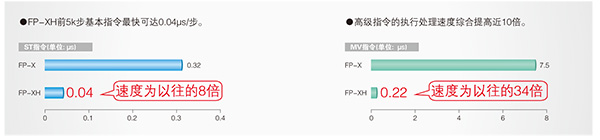
高速
|
最高0.04μs的指令处理速度
|
|
|
|
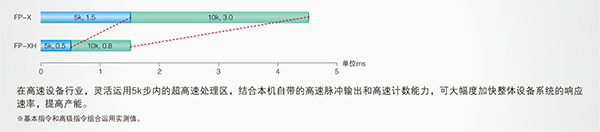
扫描周期※缩短(以40点机型对比以往产品)
|
|
|
|
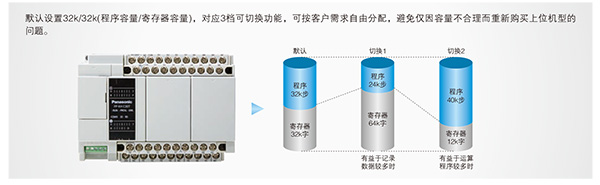
容量3档可切换设置
|
|
|
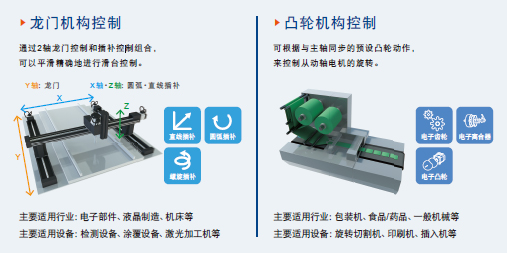
运动型位置控制
|
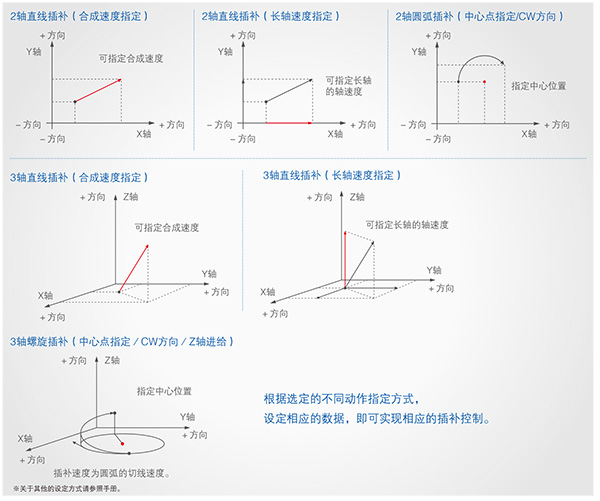
插补控制
插补控制包括2 轴直线插补、2 轴圆弧插补、3 轴直线插补、3 轴螺旋插补。
|
|
|
|
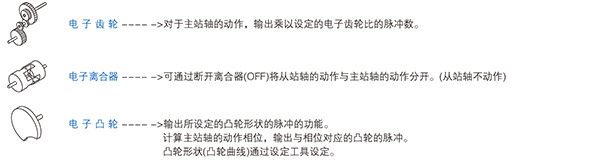
同步控制
同步控制具有以下功能。这些功能按顺序执行,各功能的运算结果变为从站轴的动作。
|
|
|
|
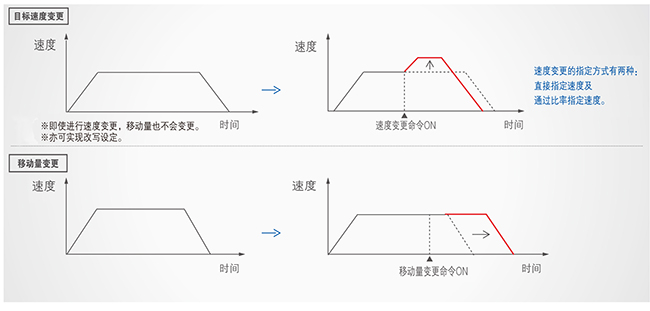
目标速度变更机能、移动量变更机能
位置控制过程中,目标速度及移动量都可以变更。可以根据设备的状态对应调整。
|
|
|
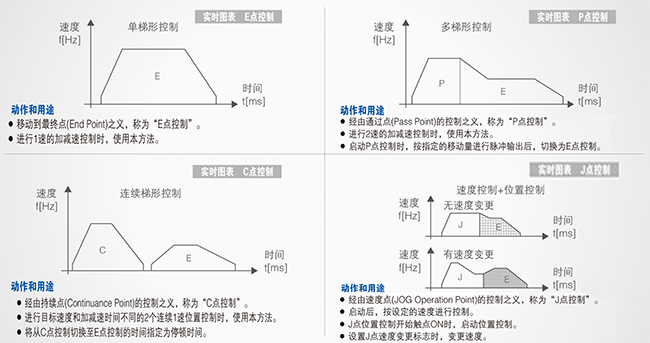
通用型位置控制
|
位置控制的种类
|
|
|
|
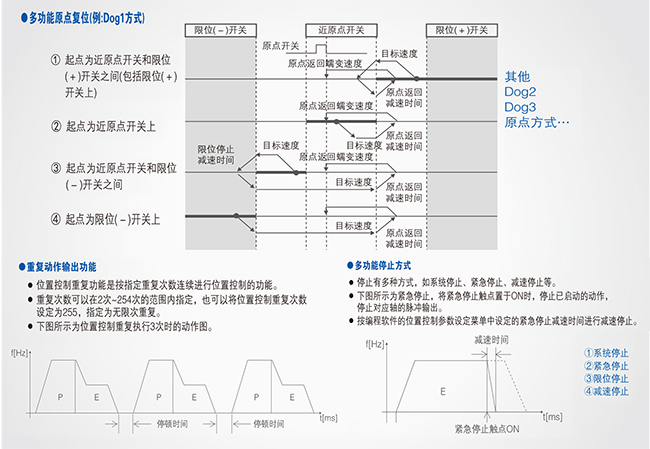
其他功能
|
|
|
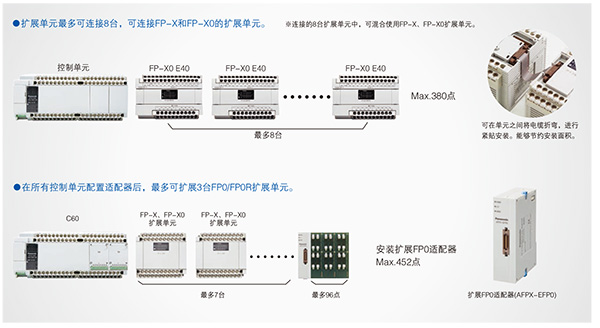
扩展性
|
I/O点数最大452点
(通过扩展FP0以及使用功能扩充插件可达到。)
|
|
|
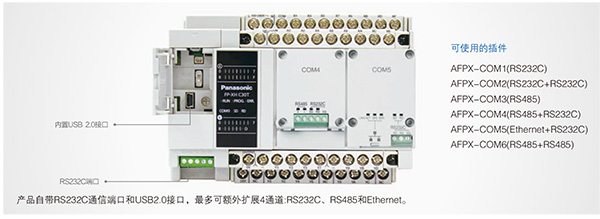
通信
|
通信端口
|
|
|
|
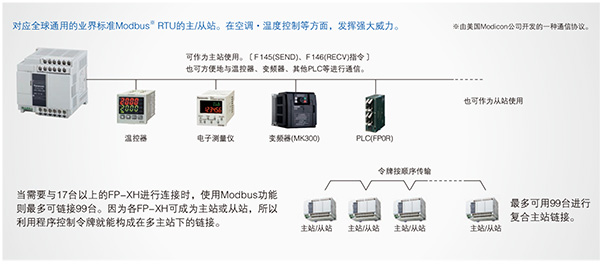
对应Modbus※
|
|
|
|
PLC链接(MEWNET)
|

|
|
编程软件
以更专业的功能软件FPWIN GR7为基础架构,后续将不断丰富更多功能,面向各行业应用扩展更专业的命令内容。
(通用型Ver.2.5以上对应,运动型Ver.2.7以上对应)
|
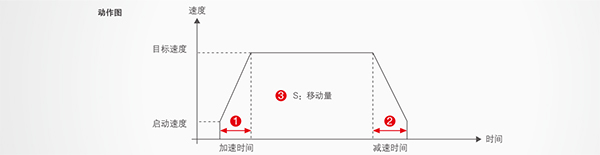
位置控制设定
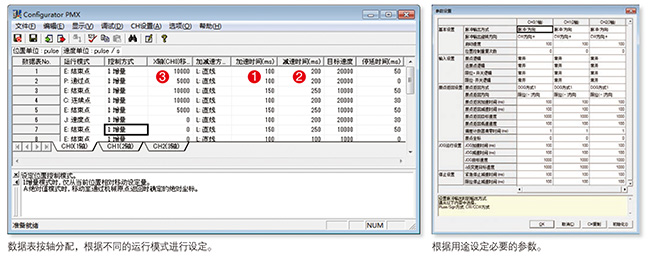
通过位置控制数据※1及位置控制参数※2的设定,实现位置控制。
|
|
※1 位置控制数据是指移动量、目标速度、加减速时间、运行模式等个别位置控制动作的信息。
※2 位置控制参数是指JOG 运行及原点返回的运行条件、限位输入逻辑、停止时的减速时间等。
|
|
|
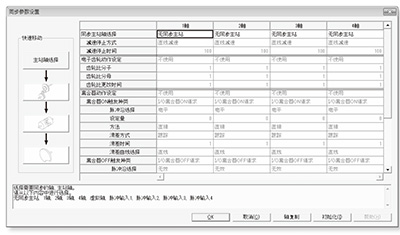
同步参数设置
根据用途选择需要同步的轴及主动轴,并对选定的轴进行参数设定,实现同步控制。
|
|
|
|
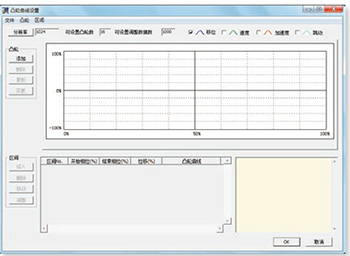
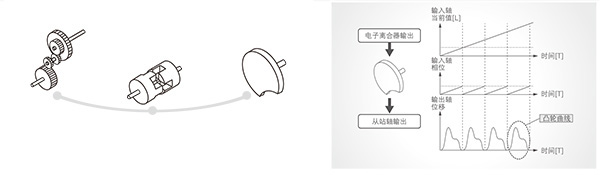
凸轮曲线※3设置
当选择电子凸轮作为从动轴时,需要对其进行设定。
|
|
|
|
|
※3 凸轮曲线是指以主站轴旋转1 圈为动作基准,主站轴的各相位(旋转角度)下从站轴的位移量,在配置画面中进行设定。
|
|
|
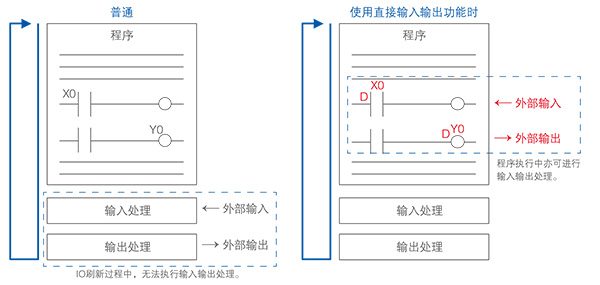
直接输入/输出功能
通过直接输入输出功能能够实现不依赖扫描周期的高速应答处理。
|
|
|
|
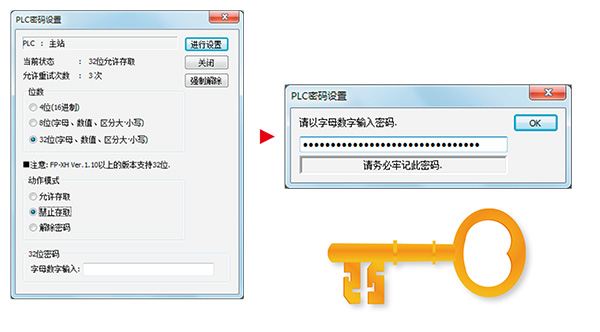
安全强化
增加字母数字32位密码对应。安全性较之前得到了提高。
|
|
|
RTEX对应 可编程控制器AFPXHM8N16T
■配线简单,高可靠性
・无需复杂的配线,可减少设计工时和配线工时。环形配线,通信可靠性强。
■高功能控制
・以高速网络和高性能伺服实现同步控制。
■RTEX位置控制单元
・可轻松控制网络伺服系统,获取下级设备使用状态,实现多轴高精度定位。



 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯