

优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
1. 概述
SPEL+是在RC170/180、RC90、RC700控制器上运行的与BASIC相近的程序语言。它支持多任务,动作控制和I/O控制。程序以ASCII文本形式创建,被编辑在可以执行的对象文件中。
2. 程序结构
一个SPEL+程序包括有函数,变量和宏指令,每一个程序以.PRG的扩展名保持到对应的项目里(Project)。一个项目至少包含有一个程序和一个main函数。函数以Function开始,Fend结束,函数名可以使用最多32个字符的半角英文数字和下划线,不区分大小写,但是不可以使用以数字和下划线开始的名称或SPEL+关键字。
3. 变量
SPEL+中有3种不同的变量。
• Local : 局部变量(用在同一Function内使用的变量)
• Module : 模块变量(在同一程序内使用的变量)
• Global : 全局变量(在同一项目内使用的变量)
程序示例:
MAIN.PRG
Function Main
Call Func1
...
Fend
Function Func1
Jump pickpnt
...
Integer m_i ‘模块变量m_i
Global (Preserve) Integer g_i全局变量(全局保护变量)
g_iFunction main
Integer I ‘局部变量i
...
Fend
Function Func1
Integer I ‘局部变量i
...
Fend
4. 变量的数据类型
变量有多种数据类型,使用前先说明类型,格式为:数据类型变量名。例如:Integer i,定义变量i为整型数据。另外,代入的数据和变量的类型必须一致。在下表中列出SPEL+ 语言中使用的数据类型。

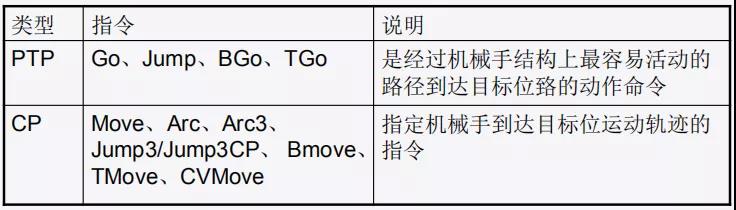
5.1 动作指令分类
使机械手动作的指令叫作动作指令。可分为:PTP动作指令,CP动作指令,Curves动作指令,Joint动作指令。
NOTE:* CP模式,即Continuous Path 连续路径模式。* 指定PTP动作指令和Joint动作指令的速度和加/减速度时,使用SPEED指令和ACCEL指令。指定CP模式动作指令时,使用使用SPEEDS指令和ACCELS指令。
5.2 PTP指令
包括指令:Go、Jump、BGo、TGoPTP(Pose To Pose)动作,是与其动作轨迹无关,以机械手的工具顶端为目标位臵使其动作的动作方法。PTP动作,使用各关节上配置的电动机,使机械手通过最短的路径到达目标位置。优点:运动速度快,缺点:运动轨迹无法预测。指定PTP动作速度和加/减速,使用SPEED指令和ACCEL指令。
5.2.1 Go 指令
功能:全轴同时的PTP动作,动作的轨迹是各关节分别对从当前的点到目标坐标进行插补。格式:Go 目标坐标示例:1. Go P1 ´机械手动作到P1点2. Go XY(50, 400, 0, 0) ´机械手动作到X=50,Y=400,Z=0,U=0 3. Go P1+X(50) ´机械手动作到P1点X坐标值偏移量为+50的位置4. Go P1:X(50) ´机械手动作到P1点对应X坐标值为50的位置
5.2.2 Jump 指令
功能:通过“门形动作”使手臂手臂从当前位臵移动至目标坐标。格式:Jump 目标坐标示例:1. Jump P1 ´机械手以“门形动作”动作到P1点2. Jump P1 LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点,如图1示3. Jump P1:Z(-10)LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点位臵Z坐标值为-10的位置
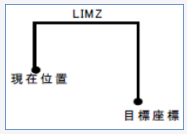
NOTE:Go与Jump的区别Jump与Go都是使机械手手臂用PTP动作移动的命令。但是Jump有Go没有的一个功能。Jump将机械手的手部先抬起至LimZ 值,然后使手臂水平移动,快要到目标坐标上空的时候使其下降移动。此动作的标准是可以更准确地避开障碍物这一点,更重要的是通过吸附、配置动作,提高作业的周期时间。
5.3 CP指令
包括指令:Move、Arc、Arc3、Jump3/Jump3CP、BMove、TMove、CVMoveCP(Continuous Path )指令可以指定机械手到达目标位臵的运动轨迹。优点:轨迹可以控制,匀速动作。缺点:速度慢。指定Linear动作速度和加/减速度,使用SPEEDS指令和ACCELS指令。
5.3.1 Move 指令
功能:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停止。格式:Move 目标坐标示例:Move P1 ´机械手以直线轨迹动作到P1点NOTE:Move与Go的区别到达目标点时的手臂的姿势重要的时候使用Go命令,但是比控制动作中的手臂的轨迹重要的时候,使用Move 命令。在SCARA机械手只有Z轴上下动作时,Go与Move的轨迹一样。

(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络

