

优傲机器人
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人

EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
优傲机器人UR3、UR5、UR10协作式工业机器人机械手臂优质经销商-镒升机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器
尊敬的客户:
近期,有很多使用爱普生机器人的客户来电咨询机械手使用的问题,为了更好的充分发挥机器人自身具备的性能,请镒升机器人的客户们正确设置负载(夹具末端重量+工件重量)与负载的装载惯性、离心率设为额定值以内,通过合理的设定,可优化爱普生机器人的PTP动作,抑制振动,缩短作业时间,提高对较大负载的对应能力。
另外,对夹具末端与工件的装载惯性较大时产生的持续振动也具有抑制效果。请务必设定适合负载的值,如果在夹具末端Weight参数中设定小于实际负载的值,则可能会导致发生错误或冲击,这不仅不能充分发挥性能,而且还可能缩短各机构部件的使用寿命或因皮带齿轮跳动发生位置间隙的可能性。
下面我们来看看爱普生机械手的正确使用方式:
重量、惯性、离心率的设置
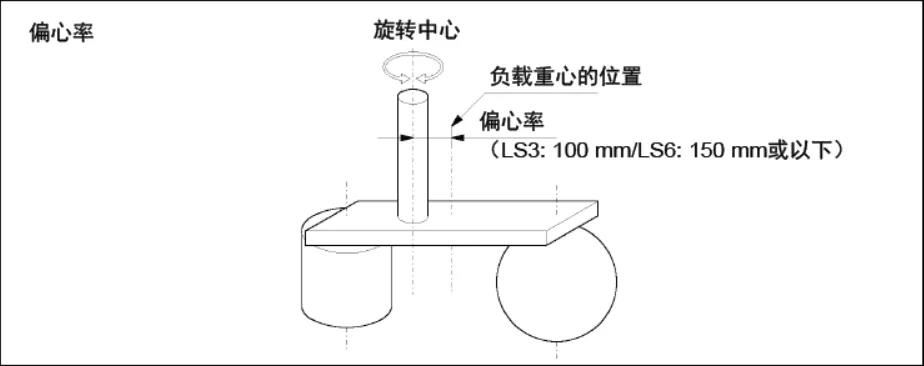
1.SCARA系列离心率的设置:
 六轴系列离心率设置:
六轴系列离心率设置: 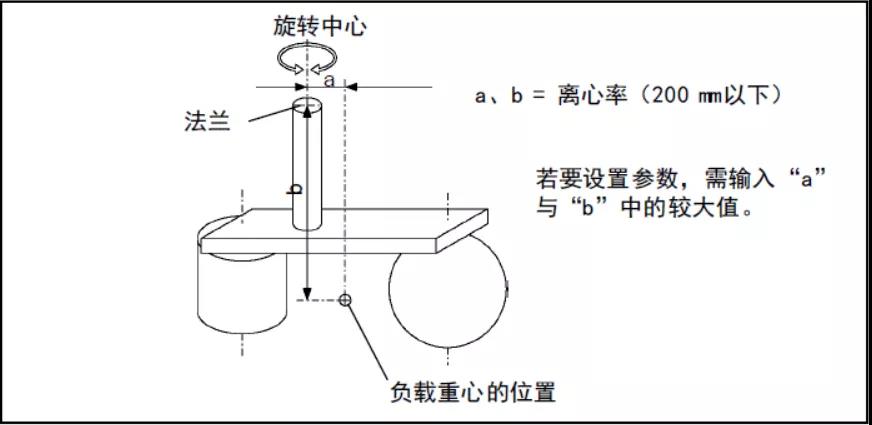 2.末端夹具重量设置:
2.末端夹具重量设置:
末端夹具重量+产品重量
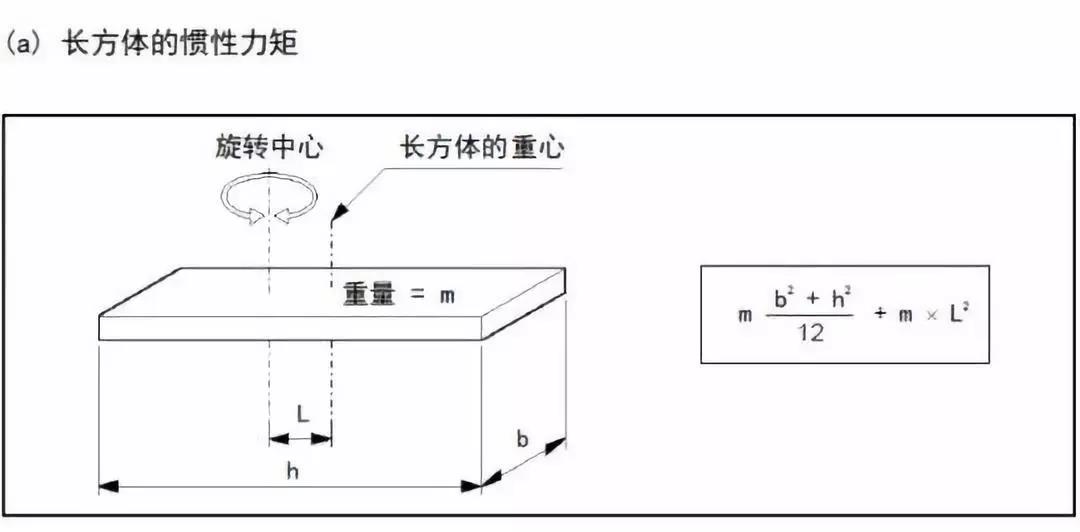
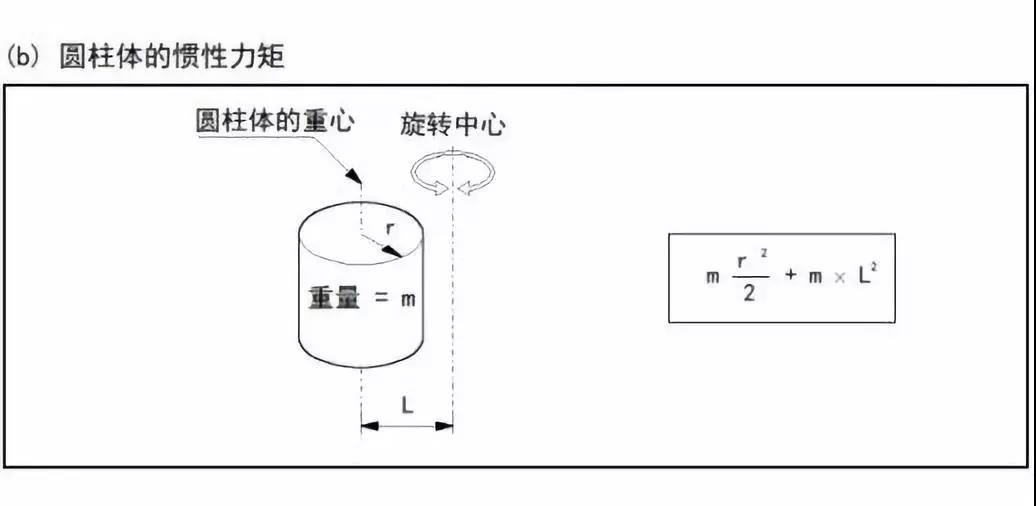
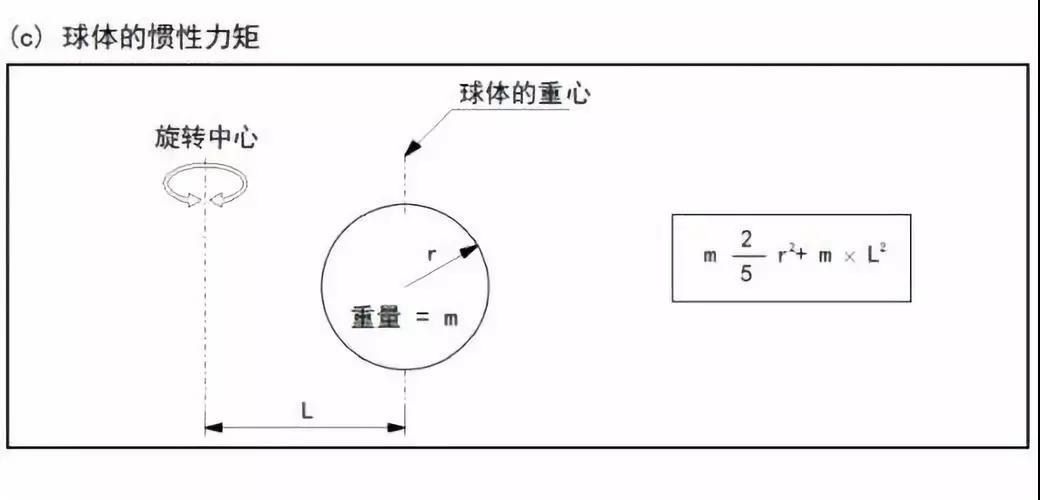
3.负载的装载惯性设置: 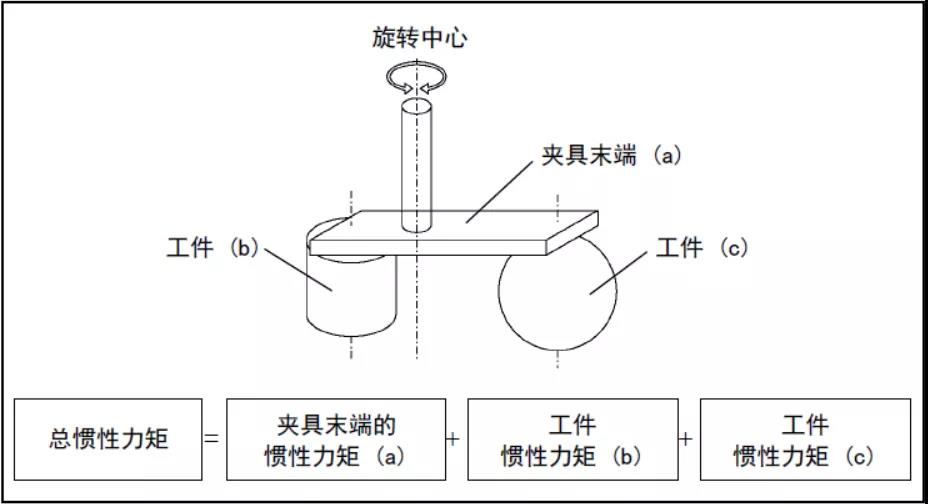
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络

